Details differ: there is a common theme: achieve your objective with the minimal use of resources to do the job.
This provides efficiency.
Engineering designer imagines a solution that requires the minimal set of components to achieve the result.
A water pump has one route through the pump.
Don’t Fail
First criterion of a natural intelligence is don’t fail.
In contrast, mantra for artificial systems is to be more efficient.
Artificial systems are given a single objective (in machine learning it is encoded in a mathematical function)
Aim to achieve that objective efficiently.
Designing out Failure
Even if we wanted to incorporate don’t fail in some form, it is difficult to design for.
To design for “don’t fail”, you have to consider every which way in which things can go wrong, if you miss one you fail. These cases are sometimes called corner cases.
Corners Everywhere
In an uncontrolled environment, almost everything is a corner.
It is difficult to imagine everything that can happen.
Most of our automated systems operate in controlled environments (e.g. a factory, a set of rails.)
Deployment in Uncontrolled Environments
Requires a different approach to systems design.
One that accounts for uncertainty in the environment
One that is robust to unforeseen circumstances.
An Intelligent System
Joint work with M. Milo
An Intelligent System
Joint work with M. Milo
Need to deal with uncertainty and increase robustness.
Today, it is easy to make a fool of an artificial intelligent agent.
Technology needs to address the challenge of the uncertain environment to achieve robust intelligences.
Successful deployments of intelligent systems are common.
Digital computers originally called automatic computers
Do we think of such a computer as intelligent?
Are we close to creating intelligence?
Two Answers
Current technology is a long way from emulating all aspects of human intelligence: there are a number of technological breakthroughs that remain before we crack the fundamental nature of human intelligence.
More controversially, I believe that there are aspects of human intelligence that we will never be able to emulate, a preserve that remains uniquely ours.
bits/min
billions
2000
6
billion calculations/s
~100
a billion
a billion
embodiment
20 minutes
5 billion years
15 trillion years
Human Communication
For sale: baby shoes, never worn
Transhumanism
Conclusion I
We are a long way from emulating human intelligence, animal intelligence, animal motion.
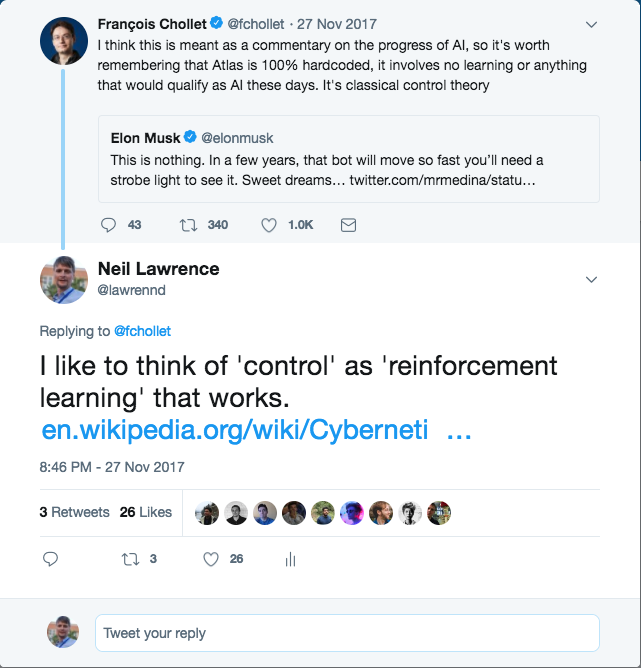
The objectives of cybernetics still have not been reached.
The robustness of natural systems is outside the scope of our current design methodologies.
Conclusion II
There is something quintisential about the human experience.
We are co-evolved to view the world in a certain way to enable collaboration.
Our consciousness is a consequence of our limitations. Our locked-in intelligence.