Machine Learning Systems Design
Cambridge AI Group Seminar
Ride Allocation Prediction
The Promise of AI
Automation forces humans to adapt, we serve.
We can only automate by systemizing and controlling environment.
AI promises to be first wave of automation that adapts to us rather than us to it.
That Promise …
… will remain unfulfilled with current systems design.
Turing AI Fellowship
- Work in this space now funded by a Senior AI Fellowship at the Turing Institute.
Project Description
It used to be true that computers only did what we programmed them to do, but today AI systems are learning from our data. This introduces new problems in how these systems respond to their environment.
We need to better monitor how data is influencing decision making and take corrective action as required.
Aim
- Scale safe and reliable AI solutions.
- Move from Auto ML to Auto AI
- Bayesian Optimisation to Bayesian System Optimisation
Motivating Examples
SafeBoda
SafeBoda
With road accidents set to match HIV/AIDS as the highest cause of death in low/middle income countries by 2030, SafeBoda’s aim is to modernise informal transportation and ensure safe access to mobility.
Turing AI Fellowship
Five year program in collaboration with
Element AI Open ML Professor Sylvie Delacroix Data Science Africa
Inclusive Project
There is no way that the team we’re building will be able to deliver on this agenda alone, so please join us in addressing these challenges!
Artificial vs Natural Systems
- Consider natural intelligence, or natural systems
- Contrast between an artificial system and an natural system.
- The key difference between the two is that artificial systems are designed whereas natural systems are evolved.
Natural Systems are Evolved
Survival of the fittest
?
Natural Systems are Evolved
Survival of the fittest
Herbet Spencer, 1864
Natural Systems are Evolved
Non-survival of the non-fit
Mistake we Make
- Equate fitness for objective function.
- Assume static environment and known objective.
.
Technical Consequence
- Classical systems design assumes decomposability.
- Data-driven systems interfere with decomponsability.
Bits and Atoms
- The gap between the game and reality.
- The need for extrapolation over interpolation.
Machine Learning Systems Design
Fragility of AI Systems
- They are componentwise built from ML Capabilities.
- Each capability is independently constructed and verified.
- Pedestrian detection
- Road line detection
- Important for verification purposes.
The Software Crisis
The major cause of the software crisis is that the machines have become several orders of magnitude more powerful! To put it quite bluntly: as long as there were no machines, programming was no problem at all; when we had a few weak computers, programming became a mild problem, and now we have gigantic computers, programming has become an equally gigantic problem.
Edsger Dijkstra (1930-2002), The Humble Programmer
The Data Crisis
The major cause of the data crisis is that machines have become more interconnected than ever before. Data access is therefore cheap, but data quality is often poor. What we need is cheap high-quality data. That implies that we develop processes for improving and verifying data quality that are efficient.
There would seem to be two ways for improving efficiency. Firstly, we should not duplicate work. Secondly, where possible we should automate work.
Me
Computer Science Paradigm Shift
- Von Neuman Architecture:
- Code and data integrated in memory
- Today:
- Code and data separated for security
Computer Science Paradigm Shift
- Machine learning:
- Software is data
- Machine learning is a high level breach of the code/data separation.
An Intelligent System
Joint work with M. Milo
An Intelligent System
Joint work with M. Milo
Peppercorns
- A new name for system failures which aren’t bugs.
- Difference between finding a fly in your soup vs a peppercorn in your soup.
Peppercorns
The Three Ds of Machine Learning Systems Design
- Three primary challenges of Machine Learning Systems Design.
- Decomposition
- Data
- Deployment
The Three Ds of Machine Learning Systems Design
- Three primary challenges of Machine Learning Systems Design.
- Decomposition
Data- Deployment
Decomposition
- ML is not Magical Pixie Dust.
- It cannot be sprinkled thoughtlessly.
- We cannot simply automate all decisions through data
Decomposition
We are constrained by:
- Our data.
- The models.
Decomposition of Task
- Careful thought needs to be put into sub-processes of task.
- Any repetitive task is a candidate for automation.
Pigeonholing

Pigeonholing
- Can we decompose decision we need to repetitive sub-tasks where inputs and outputs are well defined?
- Are those repetitive sub-tasks well represent by a mathematical mapping?
A Trap
- Over emphasis on the type of model we’re deploying.
- Under emphasis on the appropriateness of the task decomposition.
Chicken and Egg

Co-evolution
- Absolute decomposition is impossible.
- If we deploy a weak component in one place, downstream system will compensate.
- Systems co-evolve … there is no simple solution
- Trade off between performance and decomposability.
- Need to monitor deployment
Data Science as Debugging
- Analogies: For Software Engineers describe data science as debugging.
80/20 in Data Science
- Anecdotally for a given challenge
- 80% of time is spent on data wrangling.
- 20% of time spent on modelling.
- Many companies employ ML Engineers focussing on models not data.

Deployment
Premise
Our machine learning is based on a software systems view that is 20 years out of date.
Continuous Deployment
- Deployment of modeling code.
- Data dependent models in production need continuous monitoring.
- Continous monitoring implies statistical tests rather than classic software tests.
Continuous Monitoring
- Continuous deployment:
- We’ve changed the code, we should test the effect.
- Continuous Monitoring:
- The world around us is changing, we should monitor the effect.
- Update our notions of testing: progression testing
Data Oriented Architectures
- Convert data to a first-class citizen.
- View system as operations on data streams.
- Expose data operations in a programmatic way.
Data Orientated Architectures
- Historically we’ve been software first
- A necessary but not sufficient condition for data first
- Move from
- service orientated architectures
- data orientated architectures
Streaming System
- Move from pull updates to push updates.
- Operate on rows rather than columns.
- Lead to stateless logic: persistence handled by system.
- Example Apache Kafka + Apache Flink
Streaming Architectures
- AWS Kinesis, Apache Kafka
- Not just about streaming
- Nodes in the architecture are stateless
- They persist through storing state on streams
- This brings the data inside out
Apache Flink
- Streams and transformations
- a stream is a (potentially never-ending) flow of data records
- a transformation: streams as input, produces transformed streams as output
Join
stream.join(otherStream)
.where(<KeySelector>)
.equalTo(<KeySelector>)
.window(<WindowAssigner>)
.apply(<JoinFunction>)Milan
- Data Oriented Programming Language and runtime.
- DSL Embedded in Scala converts to an intermediate langugage.
- Intermediate language for compilation on different platforms (currently Flink)
Trading System
- High frequency share trading.
- Stream of prices with millisecond updates.
- Trades required on millisecond time line
Real Price
Future Price
Hypothetical Streams
- Real stream — share prices
- derived hypothetical stream — share prices in future.
- Hypothetical constrained by
- input constraints.
- decision functional
- computational requirements (latency)
Hypothetical Advantage
- Modelling is now required.
- But modelling is declared in the ecosystem.
- If it’s manual, warnings can be used
- calibration, fairness, dataset shift
- Opens door to Auto AI.
Ride Sharing: Service Oriented
Ride Sharing: Data Oriented
Ride Sharing: Hypothetical
Information Dynamics
- Potential for information feedback loops.
- Hypothetical streams are instantiated.
- Nature hypothesis (e.g. price prediction) can effect reality.
- Leads to information dynamics, similar to dynamics of governors.
- See e.g. Closed Loop Data Science at Glasgow.
The Machine Learning Bit
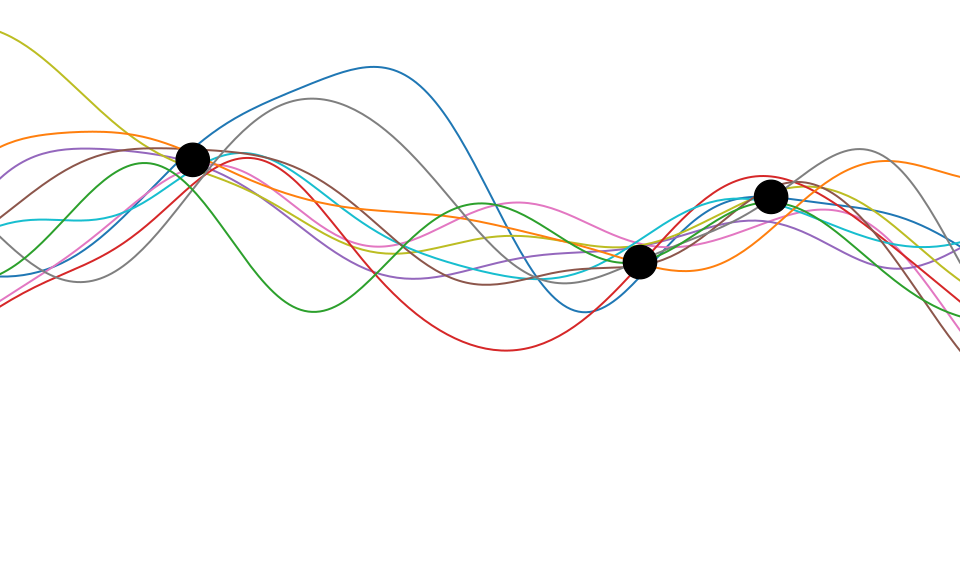
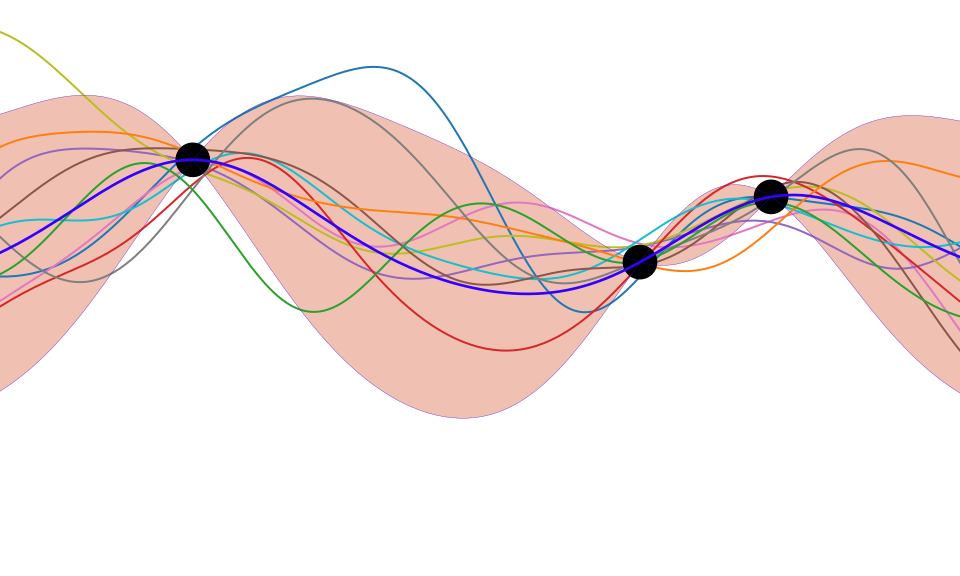
Emulation
Emulation
Emulation
Emulation
Emulation
Emulation
Deep Emulation
Deep Emulation
Deep Emulation
Emulation
Conclusion
- AI is fundamentally ML System Design
- We are not ready to deploy automation in uncontrolled environments.
- Until we can monitoring and update will be key.
Thanks!
- twitter: @lawrennd
- podcast: The Talking Machines
- newspaper: Guardian Profile Page
Blog post on Natural and Artificial Intelligence
Blog post on Decision Making and Diversity
Blog post on Natural vs Artifical Intelligence
Blog post on The 3Ds of Machine Learning Systems Design
Blog post on Data Science as Debugging