Information Engines
Abstract
The relationship between physical systems and intelligence has long fascinated researchers in computer science and physics. This talk explores fundamental connections between thermodynamic systems and intelligent decision-making through the lens of free energy principles.
We examine how concepts from statistical mechanics - particularly the relationship between total energy, free energy, and entropy - might provide novel insights into the nature of intelligence and learning. By drawing parallels between physical systems and information processing, we consider how measurement and observation can be viewed as processes that modify available energy. The discussion encompasses how model approximations and uncertainties might be understood through thermodynamic analogies, and explores the implications of treating intelligence as an energy-efficient state-change process.
While these connections remain speculative, they offer intriguing perspectives for discussing the fundamental nature of intelligence and learning systems. The talk aims to stimulate discussion about these potential relationships rather than present definitive conclusions.
Hydrodynamica
When Laplace spoke of the curve of a simple molecule of air, he may well have been thinking of Daniel Bernoulli (1700-1782). Daniel Bernoulli was one name in a prodigious family. His father and brother were both mathematicians. Daniel’s main work was known as Hydrodynamica.

Figure: Daniel Bernoulli’s Hydrodynamica published in 1738. It was one of the first works to use the idea of conservation of energy. It used Newton’s laws to predict the behaviour of gases.
Daniel Bernoulli described a kinetic theory of gases, but it wasn’t until 170 years later when these ideas were verified after Einstein had proposed a model of Brownian motion which was experimentally verified by Jean Baptiste Perrin.
Figure: Daniel Bernoulli’s chapter on the kinetic theory of gases, for a review on the context of this chapter see Mikhailov (n.d.). For 1738 this is extraordinary thinking. The notion of kinetic theory of gases wouldn’t become fully accepted in Physics until 1908 when a model of Einstein’s was verified by Jean Baptiste Perrin.
Entropy Billiards
Figure: Bernoulli’s simple kinetic models of gases assume that the molecules of air operate like billiard balls. The displayed entropy is the Shannon entropy of the observed velocity histogram (a coarse-grained proxy, not full thermodynamic entropy).
import numpy as npp = np.random.randn(10000, 1)
xlim = [-4, 4]
x = np.linspace(xlim[0], xlim[1], 200)
y = 1/np.sqrt(2*np.pi)*np.exp(-0.5*x*x)Another important figure for Cambridge was the first to derive the probability distribution that results from small balls banging together in this manner. In doing so, James Clerk Maxwell founded the field of statistical physics.
Figure: James Clerk Maxwell 1831-1879 Derived distribution of velocities of particles in an ideal gas (elastic fluid).
Figure: James Clerk Maxwell (1831-1879), Ludwig Boltzmann (1844-1906) Josiah Willard Gibbs (1839-1903)
Many of the ideas of early statistical physicists were rejected by a cadre of physicists who didn’t believe in the notion of a molecule. The stress of trying to have his ideas established caused Boltzmann to commit suicide in 1906, only two years before the same ideas became widely accepted.
Figure: Boltzmann’s paper Boltzmann (n.d.) which introduced the relationship between entropy and probability. A translation with notes is available in Sharp and Matschinsky (2015).
The important point about the uncertainty being represented here is that it is not genuine stochasticity, it is a lack of knowledge about the system. The techniques proposed by Maxwell, Boltzmann and Gibbs allow us to exactly represent the state of the system through a set of parameters that represent the sufficient statistics of the physical system. We know these values as the volume, temperature, and pressure. The challenge for us, when approximating the physical world with the techniques we will use is that we will have to sit somewhere between the deterministic and purely stochastic worlds that these different scientists described.
One ongoing characteristic of people who study probability and uncertainty is the confidence with which they hold opinions about it. Another leader of the Cavendish laboratory expressed his support of the second law of thermodynamics (which can be proven through the work of Gibbs/Boltzmann) with an emphatic statement at the beginning of his book.

Figure: Eddington’s book on the Nature of the Physical World (Eddington, 1929)
The same Eddington is also famous for dismissing the ideas of a young Chandrasekhar who had come to Cambridge to study in the Cavendish lab. Chandrasekhar demonstrated the limit at which a star would collapse under its own weight to a singularity, but when he presented the work to Eddington, he was dismissive suggesting that there “must be some natural law that prevents this abomination from happening.”
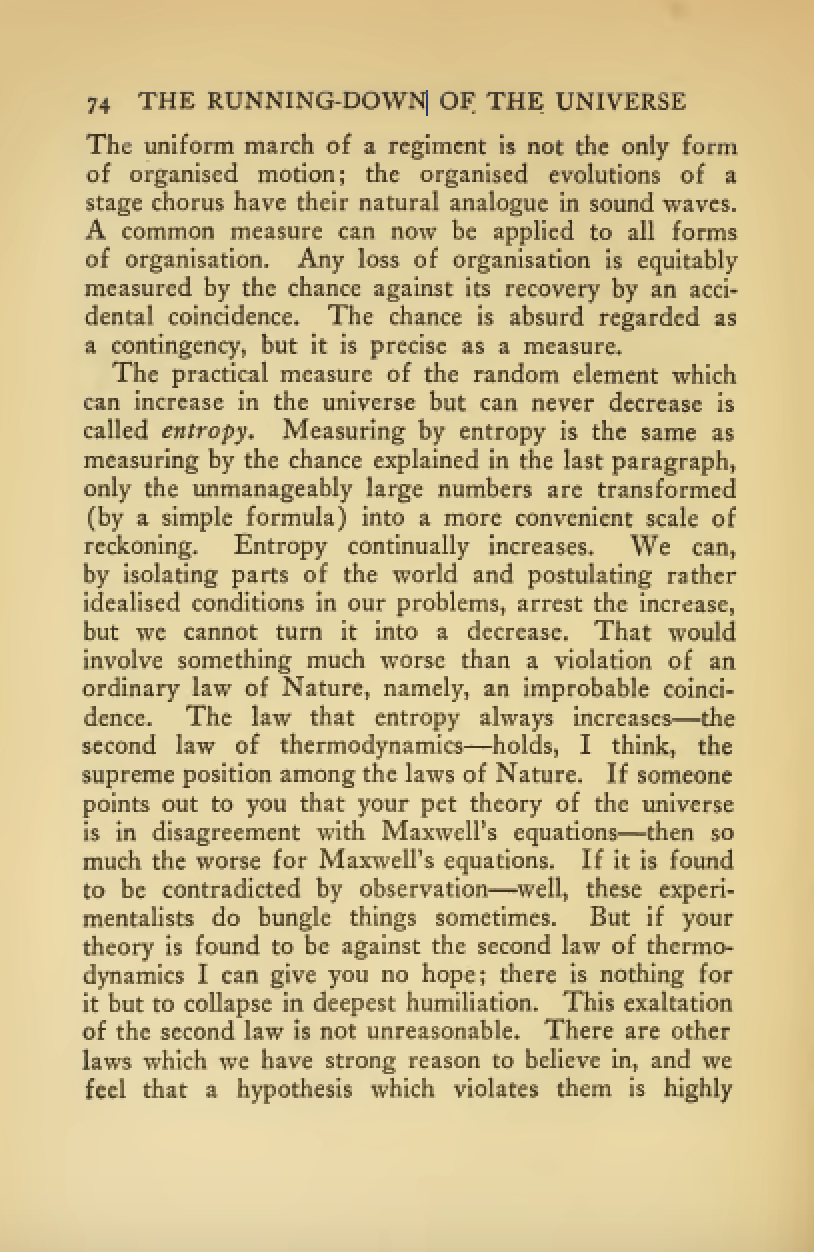
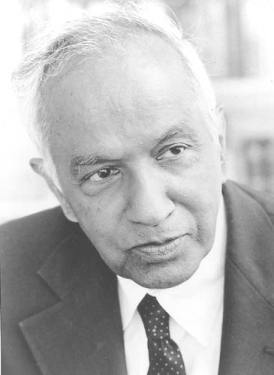
Figure: Chandrasekhar (1910-1995) derived the limit at which a star collapses in on itself. Eddington’s confidence in the 2nd law may have been what drove him to dismiss Chandrasekhar’s ideas, humiliating a young scientist who would later receive a Nobel prize for the work.
Figure: Eddington makes his feelings about the primacy of the second law clear. This primacy is perhaps because the second law can be demonstrated mathematically, building on the work of Maxwell, Gibbs and Boltzmann. Eddington (1929)
Presumably he meant that the creation of a black hole seemed to transgress the second law of thermodynamics, although later Hawking was able to show that blackholes do evaporate, but the time scales at which this evaporation occurs is many orders of magnitude slower than other processes in the universe.
Maxwell’s Demon
Maxwell’s demon is a thought experiment described by James Clerk Maxwell in his book, Theory of Heat (Maxwell, 1871) on page 308.
But if we conceive a being whose faculties are so sharpened that he can follow every molecule in its course, such a being, whose attributes are still as essentially finite as our own, would be able to do what is at present impossible to us. For we have seen that the molecules in a vessel full of air at uniform temperature are moving with velocities by no means uniform, though the mean velocity of any great number of them, arbitrarily selected, is almost exactly uniform. Now let us suppose that such a vessel is divided into two portions, A and B, by a division in which there is a small hole, and that a being, who can see the individual molecules, opens and closes this hole, so as to allow only the swifter molecules to pass from A to B, and the only the slower ones to pass from B to A. He will thus, without expenditure of work, raise the temperature of B and lower that of A, in contradiction to the second law of thermodynamics.
James Clerk Maxwell in Theory of Heat (Maxwell, 1871) page 308
He goes onto say:
This is only one of the instances in which conclusions which we have draw from our experience of bodies consisting of an immense number of molecules may be found not to be applicable to the more delicate observations and experiments which we may suppose made by one who can perceive and handle the individual molecules which we deal with only in large masses
Figure: Maxwell’s demon was designed to highlight the statistical nature of the second law of thermodynamics.
Figure: Maxwell’s Demon. The demon decides balls are either cold (blue) or hot (red) according to their velocity. Balls are allowed to pass the green membrane from right to left only if they are cold, and from left to right only if they are hot. The displayed entropy is the Shannon entropy of the velocity histogram (a coarse-grained proxy, not full thermodynamic entropy).
Maxwell’s demon allows us to connect thermodynamics with information theory (see e.g. Hosoya et al. (2015);Hosoya et al. (2011);Bub (2001);Brillouin (1951);Szilard (1929)). The connection arises due to a fundamental connection between information erasure and energy consumption Landauer (1961).
Alemi and Fischer (2019)
Information Theory and Thermodynamics
Information theory provides a mathematical framework for quantifying information. Many of information theory’s core concepts parallel those found in thermodynamics. The theory was developed by Claude Shannon who spoke extensively to MIT’s Norbert Wiener at while it was in development (Conway and Siegelman, 2005). Wiener’s own ideas about information were inspired by Willard Gibbs, one of the pioneers of the mathematical understanding of free energy and entropy. Deep connections between physical systems and information processing have connected information and energy from the start.
Entropy
Shannon’s entropy measures the uncertainty or unpredictability of information content. This mathematical formulation is inspired by thermodynamic entropy, which describes the dispersal of energy in physical systems. Both concepts quantify the number of possible states and their probabilities.
Figure: Maxwell’s demon thought experiment illustrates the relationship between information and thermodynamics.
In thermodynamics, free energy represents the energy available to do work. A system naturally evolves to minimize its free energy, finding equilibrium between total energy and entropy. Free energy principles are also pervasive in variational methods in machine learning. They emerge from Bayesian approaches to learning and have been heavily promoted by e.g. Karl Friston as a model for the brain.
The relationship between entropy and Free Energy can be explored through the Legendre transform. This is most easily reviewed if we restrict ourselves to distributions in the exponential family.
Exponential Family
The exponential family has the form \[ \rho(Z) = h(Z) \exp\left(\boldsymbol{\theta}^\top T(Z) + A(\boldsymbol{\theta})\right) \] where \(h(Z)\) is the base measure, \(\boldsymbol{\theta}\) is the natural parameters, \(T(Z)\) is the sufficient statistics and \(A(\boldsymbol{\theta})\) is the log partition function. Its entropy can be computed as \[ S(Z) = A(\boldsymbol{\theta}) - \boldsymbol{\theta}^\top \nabla_\boldsymbol{\theta}A(\boldsymbol{\theta}) - E_{\rho(Z)}\left[\log h(Z)\right], \] where \(E_{\rho(Z)}[\cdot]\) is the expectation under the distribution \(\rho(Z)\).
Available Energy
Work through Measurement
In machine learning and Bayesian inference, the Markov blanket is the set of variables that are conditionally independent of the variable of interest given the other variables. To introduce this idea into our information system, we first split the system into two parts, the variables, \(X\), and the memory \(M\).
The variables are the portion of the system that is stochastically evolving over time. The memory is a low entropy partition of the system that will give us knowledge about this evolution.
We can now write the joint entropy of the system in terms of the mutual information between the variables and the memory. \[ S(Z) = S(X,M) = S(X|M) + S(M) = S(X) - I(X;M) + S(M). \] This gives us the first hint at the connection between information and energy.
If \(M\) is viewed as a measurement then the change in entropy of the system before and after measurement is given by \(S(X|M) - S(X)\) wehich is given by \(-I(X;M)\). This is implies that measurement increases the amount of available energy we obtain from the system (Parrondo et al., 2015).
The difference in available energy is given by \[ \Delta A = A(X) - A(Z|M) = I(X;M), \] where we note that the resulting system is no longer in thermodynamic equilibrium due to the low entropy of the memory.
The Animal Game
The Entropy Game is a framework for understanding efficient uncertainty reduction. To start think of finding the optimal strategy for identifying an unknown entity by asking the minimum number of yes/no questions.
The 20 Questions Paradigm
In the game of 20 Questions player one (Alice) thinks of an object, player two (Bob) must identify it by asking at most 20 yes/no questions. The optimal strategy is to divide the possibility space in half with each question. The binary search approach ensures maximum information gain with each inquiry and can access \(2^20\) or about a million different objects.
Figure: The optimal strategy in the Entropy Game resembles a binary search, dividing the search space in half with each question.
Entropy Reduction and Decisions
From an information-theoretic perspective, decisions can be taken in a way that efficiently reduces entropy - our the uncertainty about the state of the world. Each observation or action an intelligent agent takes should maximize expected information gain, optimally reducing uncertainty given available resources.
The entropy before the question is \(S(X)\). The entropy after the question is \(S(X|M)\). The information gain is the difference between the two, \(I(X;M) = S(X) - S(X|M)\). Optimal decision making systems maximize this information gain per unit cost.
Thermodynamic Parallels
The entropy game connects decision-making to thermodynamics.
This perspective suggests a profound connection: intelligence might be understood as a special case of systems that efficiently extract, process, and utilize free energy from their environments, with thermodynamic principles setting fundamental constraints on what’s possible.
Information Engines: Intelligence as an Energy-Efficiency
The entropy game shows some parallels between thermodynamics and measurement. This allows us to imagine information engines, simple systems that convert information to energy. This is our first simple model of intelligence.
Measurement as a Thermodynamic Process: Information-Modified Second Law
The second law of thermodynamics was generalised to include the effect of measurement by Sagawa and Ueda (Sagawa and Ueda, 2008). They showed that the maximum extractable work from a system can be increased by \(k_BTI(X;M)\) where \(k_B\) is Boltzmann’s constant, \(T\) is temperature and \(I(X;M)\) is the information gained by making a measurement, \(M\), \[ I(X;M) = \sum_{x,m} \rho(x,m) \log \frac{\rho(x,m)}{\rho(x)\rho(m)}, \] where \(\rho(x,m)\) is the joint probability of the system and measurement (see e.g. eq 14 in Sagawa and Ueda (2008)). This can be written as \[ W_\text{ext} \leq - \Delta\mathcal{F} + k_BTI(X;M), \] where \(W_\text{ext}\) is the extractable work and it is upper bounded by the negative change in free energy, \(\Delta \mathcal{F}\), plus the energy gained from measurement, \(k_BTI(X;M)\). This is the information-modified second law.
The measurements can be seen as a thermodynamic process. In theory measurement, like computation is reversible. But in practice the process of measurement is likely to erode the free energy somewhat, but as long as the energy gained from information, \(kTI(X;M)\) is greater than that spent in measurement the pricess can be thermodynamically efficient.
The modified second law shows that the maximum additional extractable work is proportional to the information gained. So information acquisition creates extractable work potential. Thermodynamic consistency is maintained by properly accounting for information-entropy relationships.
Efficacy of Feedback Control
Sagawa and Ueda extended this relationship to provide a generalised Jarzynski equality for feedback processes (Sagawa and Ueda, 2010). The Jarzynski equality is an imporant result from nonequilibrium thermodynamics that relates the average work done across an ensemble to the free energy difference between initial and final states (Jarzynski, 1997), \[ \left\langle \exp\left(-\frac{W}{k_B T}\right) \right\rangle = \exp\left(-\frac{\Delta\mathcal{F}}{k_BT}\right), \] where \(\langle W \rangle\) is the average work done across an ensemble of trajectories, \(\Delta\mathcal{F}\) is the change in free energy, \(k_B\) is Boltzmann’s constant, and \(\Delta S\) is the change in entropy. Sagawa and Ueda extended this equality to to include information gain from measurement (Sagawa and Ueda, 2010), \[ \left\langle \exp\left(-\frac{W}{k_B T}\right) \exp\left(\frac{\Delta\mathcal{F}}{k_BT}\right) \exp\left(-\mathcal{I}(X;M)\right)\right\rangle = 1, \] where \(\mathcal{I}(X;M) = \log \frac{\rho(X|M)}{\rho(X)}\) is the information gain from measurement, and the mutual information is recovered \(I(X;M) = \left\langle \mathcal{I}(X;M) \right\rangle\) as the average information gain.
Sagawa and Ueda introduce an efficacy term that captures the effect of feedback on the system they note in the presence of feedback, \[ \left\langle \exp\left(-\frac{W}{k_B T}\right) \exp\left(\frac{\Delta\mathcal{F}}{k_BT}\right)\right\rangle = \gamma, \] where \(\gamma\) is the efficacy.
Channel Coding Perspective on Memory
When viewing \(M\) as an information channel between past and future states, Shannon’s channel coding theorems apply (Shannon, 1948). The channel capacity \(C\) represents the maximum rate of reliable information transmission [ C = _{(M)} I(X_1;M) ] and for a memory of \(n\) bits we have [ C n, ] as the mutual information is upper bounded by the entropy of \(\rho(M)\) which is at most \(n\) bits.
This relationship seems to align with Ashby’s Law of Requisite Variety (pg 229 Ashby (1952)), which states that a control system must have at least as much ‘variety’ as the system it aims to control. In the context of memory systems, this means that to maintain temporal correlations effectively, the memory’s state space must be at least as large as the information content it needs to preserve. This provides a lower bound on the necessary memory capacity that complements the bound we get from Shannon for channel capacity.
This helps determine the required memory size for maintaining temporal correlations, optimal coding strategies, and fundamental limits on temporal correlation preservation.
Decomposition into Past and Future
Model Approximations and Thermodynamic Efficiency
Intelligent systems must balance measurement against energy efficiency and time requirements. A perfect model of the world would require infinite computational resources and speed, so approximations are necessary. This leads to uncertainties. Thermodynamics might be thought of as the physics of uncertainty: at equilibrium thermodynamic systems find thermodynamic states that minimize free energy, equivalent to maximising entropy.
Markov Blanket
To introduce some structure to the model assumption. We split \(X\) into \(X_0\) and \(X_1\). \(X_0\) is past and present of the system, \(X_1\) is future The conditional mutual information \(I(X_0;X_1|M)\) which is zero if \(X_1\) and \(X_0\) are independent conditioned on \(M\).
At What Scales Does this Apply?
The equipartition theorem tells us that at equilibrium the average energy is \(kT/2\) per degree of freedom. This means that for systems that operate at “human scale” the energy involved is many orders of magnitude larger than the amount of information we can store in memory. For a car engine producing 70 kW of power at 370 Kelvin, this implies \[ \frac{2 \times 70,000}{370 \times k_B} = \frac{2 \times 70,000}{370\times 1.380649×10^{−23}} = 2.74 × 10^{25} \] degrees of freedom per second. If we make a conservative assumption of one bit per degree of freedom, then the mutual information we would require in one second for comparative energy production would be around 3400 zettabytes, implying a memory bandwidth of around 3,400 zettabytes per second. In 2025 the estimate of all the data in the world stands at 149 zettabytes.
Small-Scale Biochemical Systems and Information Processing
While macroscopic systems operate in regimes where traditional thermodynamics dominates, microscopic biological systems operate at scales where information and thermal fluctuations become critically important. Here we examine how the framework applies to molecular machines and processes that have evolved to operate efficiently at these scales.
Molecular machines like ATP synthase, kinesin motors, and the photosynthetic apparatus can be viewed as sophisticated information engines that convert energy while processing information about their environment. These systems have evolved to exploit thermal fluctuations rather than fight against them, using information processing to extract useful work.
ATP Synthase: Nature’s Rotary Engine
ATP synthase functions as a rotary molecular motor that synthesizes ATP from ADP and inorganic phosphate using a proton gradient. The system uses the proton gradient as both an energy source and an information source about the cell’s energetic state and exploits Brownian motion through a ratchet mechanism. It converts information about proton locations into mechanical rotation and ultimately chemical energy with approximately 3-4 protons required per ATP.
Estimates suggest that one synapse firing may require \(10^4\) ATP molecules, so around \(4 \times 10^4\) protons. If we take the human brain as containing around \(10^{14}\) synapses, and if we suggest each synapse only fires about once every five seconds, we would require approximately \(10^{18}\) protons per second to power the synapses in our brain. With each proton having six degrees of freedom. Under these rough calculations the memory capacity distributed across the ATP Synthase in our brain must be of order \(6 \times 10^{18}\) bits per second or 750 petabytes of information per second. Of course this memory capacity would be devolved across the billions of neurons within hundreds or thousands of mitochondria that each can contain thousands of ATP synthase molecules. By composition of extremely small systems we can see it’s possible to improve efficiencies in ways that seem very impractical for a car engine.
Quick note to clarify, here we’re referring to the information requirements to make our brain more energy efficient in its information processing rather than the information processing capabilities of the neurons themselves!
Jaynes’ World
Jaynes’ World is a zero-player game that implements a version of the entropy game. The dynamical system is defined by a distribution, \(\rho(Z)\), over a state space \(Z\). The state space is partitioned into observable variables \(X\) and memory variables \(M\). The memory variables are considered to be in an information resevoir, a thermodynamic system that maintains information in an ordered state (see e.g. Barato and Seifert (2014)). The entropy of the whole system is bounded below by 0 and above by \(N\). So the entropy forms a compact manifold with respect to its parameters.
Unlike the animal game, where decisions are made by reducing entropy at each step, our system evovles mathematically by maximising the instantaneous entropy production. Conceptually we can think of this as ascending the gradient of the entropy, \(S(Z)\).
In the animal game the questioner starts with maximum uncertainty and targets minimal uncertainty. Jaynes’ world starts with minimal uncertainty and aims for maximum uncertainty.
We can phrase this as a thought experiment. Imagine you are in the game, at a given turn. You want to see where the game came from, so you look back across turns. The direction the game came from is now the direction of steepest descent. Regardless of where the game actually started it looks like it started at a minimal entropy configuration that we call the origin. Similarly, wherever the game is actually stopped there will nevertheless appear to be an end point we call end that will be a configuration of maximal entropy, \(N\).
This speculation allows us to impose the functional form of our proability distribution. As Jaynes has shown (Jaynes, 1957), the stationary points of a free-form optimisation (minimum or maximum) will place the distribution in the, \(\rho(Z)\) in the exponential family, \[ \rho(Z) = h(Z) \exp(\boldsymbol{\theta}^\top T(Z) - A(\boldsymbol{\theta})), \] where \(h(Z)\) is the base measure, \(T(Z)\) are sufficient statistics, \(A(\boldsymbol{\theta})\) is the log-partition function, \(\boldsymbol{\theta}\) are the natural parameters of the distribution.}
This constraint to the exponential family is highly convenient as we will rely on it heavily for the dynamics of the game. In particular, by focussing on the natural parameters we find that we are optimising within an information geometry (Amari, 2016). In exponential family distributions, the entropy gradient is given by, \[ \nabla_{\boldsymbol{\theta}}S(Z) = \mathbf{g} = \nabla^2_\boldsymbol{\theta} A(\boldsymbol{\theta}(M)) \] And the Fisher information matrix, \(G(\boldsymbol{\theta})\), is also the Hessian of the manifold, \[ G(\boldsymbol{\theta}) = \nabla^2_{\boldsymbol{\theta}} A(\boldsymbol{\theta}) = \text{Cov}[T(Z)]. \] Traditionally, when optimising on an information geometry we take natural gradient steps, equivalen to a Newton minimisation step, \[ \Delta \boldsymbol{\theta} = - G(\boldsymbol{\theta})^{-1} \mathbf{g}, \] but this is not the direction that gives the instantaneious maximisation of the entropy production, instead our gradient step is given by \[ \Delta \boldsymbol{\theta} = \eta \mathbf{g}, \] where \(\eta\) is a ‘learning rate.’
System Evolution
We are now in a position to summarise the start state and the end state of our system, as well as to speculate on the nature of the transition between the two states.
Start State
The origin configuration is a low entropy state, with value near the lower bound of 0. The information is highly structured, by definition we place all variables in \(M\), the information resevoir at this time. The uncertainty principle is present to handle the competeing needs of precision in parameters (giving us the near-singular form for \(\boldsymbol{\theta}(M)\), and capacity in the information channel that \(M\) provides (the capacity \(c(\boldsymbol{\theta})\) is upper bounded by \(S(M)\).
End State
The end configuration is a high entropy state, near the upper bound. Both the minimal entropy and maximal entropy states are revealed by Ed Jaynes’ variational minimisation approach and are in the exponential family. In many cases a version of Zeno’s paradox will arise where the system asymtotes to the final state, taking smaller steps at each time. At this point the system is at equilibrium.
Histogram Game
To illustrate the concept of the Jaynes’ world entropy game we’ll run a simple example using a four bin histogram. The entropy of a four bin histogram can be computed as, \[ S(p) = - \sum_{i=1}^4 p_i \log_2 p_i. \]
import numpy as npFirst we write some helper code to plot the histogram and compute its entropy.
We can compute the entropy of any given histogram.
# Define probabilities
p = np.zeros(4)
p[0] = 4/13
p[1] = 3/13
p[2] = 3.7/13
p[3] = 1 - p.sum()
# Safe entropy calculation
nonzero_p = p[p > 0] # Filter out zeros
entropy = - (nonzero_p*np.log2(nonzero_p)).sum()
print(f"The entropy of the histogram is {entropy:.3f}.")Figure: The entropy of a four bin histogram.
We can play the entropy game by starting with a histogram with all the probability mass in the first bin and then ascending the gradient of the entropy function.
Four Bin Histogram Entropy Game
To do this we represent the histogram parameters as a vector of length 4, \(\mathbf{ w}{\lambda} = [\lambda_1, \lambda_2, \lambda_3, \lambda_4]\) and define the histogram probabilities to be \(p_i = \lambda_i^2 / \sum_{j=1}^4 \lambda_j^2\).
import numpy as npWe can then ascend the gradeint of the entropy function, starting at a parameter setting where the mass is placed in the first bin, we take \(\lambda_2 = \lambda_3 = \lambda_4 = 0.01\) and \(\lambda_1 = 100\).
First to check our code we compare our numerical and analytic gradients.
import numpy as np# Initial parameters (lambda)
initial_lambdas = np.array([100, 0.01, 0.01, 0.01])
# Gradient check
numerical_grad = numerical_gradient(entropy, initial_lambdas)
analytical_grad = entropy_gradient(initial_lambdas)
print("Numerical Gradient:", numerical_grad)
print("Analytical Gradient:", analytical_grad)
print("Gradient Difference:", np.linalg.norm(numerical_grad - analytical_grad)) # Check if close to zeroNow we can run the steepest ascent algorithm.
import numpy as np# Steepest ascent algorithm
lambdas = initial_lambdas.copy()
learning_rate = 1
turns = 15000
entropy_values = []
lambdas_history = []
for _ in range(turns):
grad = entropy_gradient(lambdas)
lambdas += learning_rate * grad # update lambda for steepest ascent
entropy_values.append(entropy(lambdas))
lambdas_history.append(lambdas.copy())We can plot the histogram at a set of chosen turn numbers to see the progress of the algorithm.
Figure: Intermediate stages of the histogram entropy game. After 0, 1000, 5000, 10000 and 15000 iterations.
And we can also plot the changing entropy as a function of the number of game turns.
Figure: Four bin histogram entropy game. The plot shows the increasing entropy against the number of turns across 15000 iterations of gradient ascent.
Note that the entropy starts at a saddle point, increaseases rapidly, and the levels off towards the maximum entropy, with the gradient decreasing slowly in the manner of Zeno’s paradox.
Two-Bin Histogram Example
The simplest possible example of Jaynes’ World is a two-bin histogram with probabilities \(p\) and \(1-p\). This minimal system allows us to visualize the entire entropy landscape.
The natural parameter is the log odds, \(\theta = \log\frac{p}{1-p}\), and the update given by the entropy gradient is \[ \Delta \theta_{\text{steepest}} = \eta \frac{\text{d}S}{\text{d}\theta} = \eta p(1-p)(\log(1-p) - \log p). \] The Fisher information is \[ G(\theta) = p(1-p) \] This creates a dynamic where as \(p\) approaches either 0 or 1 (minimal entropy states), the Fisher information approaches zero, creating a critical slowing" effect. This critical slowing is what leads to the formation of information resevoirs. Note also that in the natural gradient the updated is given by multiplying the gradient by the inverse Fisher information, which would lead to a more efficient update of the form, \[ \Delta \theta_{\text{natural}} = \eta(\log(1-p) - \log p), \] however, it is this efficiency that we want our game to avoid, because it is the inefficient behaviour in the reagion of saddle points that leads to critical slowing and the emergence of information resevoirs.
import numpy as np# Python code for gradients
p_values = np.linspace(0.000001, 0.999999, 10000)
theta_values = np.log(p_values/(1-p_values))
entropy = -p_values * np.log(p_values) - (1-p_values) * np.log(1-p_values)
fisher_info = p_values * (1-p_values)
gradient = fisher_info * (np.log(1-p_values) - np.log(p_values))Figure: Entropy gradients of the two bin histogram agains position.
This example reveals the entropy extrema at \(p = 0\), \(p = 0.5\), and \(p = 1\). At minimal entropy (\(p \approx 0\) or \(p \approx 1\)), the gradient approaches zero, creating natural information reservoirs. The dynamics slow dramatically near these points - these are the areas of critical slowing that create information reservoirs.
Gradient Ascent in Natural Parameter Space
We can visualize the entropy maximization process by performing gradient ascent in the natural parameter space \(\theta\). Starting from a low-entropy state, we follow the gradient of entropy with respect to \(\theta\) to reach the maximum entropy state.
import numpy as np# Parameters for gradient ascent
theta_initial = -9.0 # Start with low entropy
learning_rate = 1
num_steps = 1500
# Initialize
theta_current = theta_initial
theta_history = [theta_current]
p_history = [theta_to_p(theta_current)]
entropy_history = [entropy(theta_current)]
# Perform gradient ascent in theta space
for step in range(num_steps):
# Compute gradient
grad = entropy_gradient(theta_current)
# Update theta
theta_current = theta_current + learning_rate * grad
# Store history
theta_history.append(theta_current)
p_history.append(theta_to_p(theta_current))
entropy_history.append(entropy(theta_current))
if step % 100 == 0:
print(f"Step {step+1}: θ = {theta_current:.4f}, p = {p_history[-1]:.4f}, Entropy = {entropy_history[-1]:.4f}")Figure: Evolution of the two-bin histogram during gradient ascent in natural parameter space.
Figure: Entropy evolution during gradient ascent for the two-bin histogram.
Figure: Gradient ascent trajectory in the natural parameter space for the two-bin histogram.
The gradient ascent visualization shows how the system evolves in the natural parameter space \(\theta\). Starting from a negative \(\theta\) (corresponding to a low-entropy state with \(p << 0.5\)), the system follows the gradient of entropy with respect to \(\theta\) until it reaches \(\theta = 0\) (corresponding to \(p = 0.5\)), which is the maximum entropy state.
Note that the maximum entropy occurs at \(\theta = 0\), which corresponds to \(p = 0.5\). The gradient of entropy with respect to \(\theta\) is zero at this point, making it a stable equilibrium for the gradient ascent process.
Four-Bin Saddle Point Example
To illustrate saddle points and information reservoirs, we need at least a 4-bin system. This creates a 3-dimensional parameter space where we can observe genuine saddle points.
Consider a 4-bin system parameterized by natural parameters \(\theta_1\), \(\theta_2\), and \(\theta_3\) (with one constraint). A saddle point occurs where the gradient \(\nabla_\theta S = 0\), but the Hessian has mixed eigenvalues - some positive, some negative.
At these points, the Fisher information matrix \(G(\theta)\) eigendecomposition reveals.
- Fast modes: large positive eigenvalues → rapid evolution
- Slow modes: small positive eigenvalues → gradual evolution
- Critical modes: near-zero eigenvalues → information reservoirs
The eigenvectors of \(G(\theta)\) at the saddle point determine which parameter combinations form information reservoirs.
import numpy as np# Test the gradient calculation
test_theta = np.array([0.5, -0.3, 0.1, -0.3])
test_theta = test_theta - np.mean(test_theta) # Ensure constraint is satisfied
print("Testing gradient calculation:")
analytical_grad, numerical_grad = check_gradient(test_theta)
# Verify if we're ascending or descending
entropy_before = exponential_family_entropy(test_theta)
step_size = 0.01
test_theta_after = test_theta + step_size * analytical_grad
entropy_after = exponential_family_entropy(test_theta_after)
print(f"Entropy before step: {entropy_before}")
print(f"Entropy after step: {entropy_after}")
print(f"Change in entropy: {entropy_after - entropy_before}")
if entropy_after > entropy_before:
print("We are ascending the entropy gradient")
else:
print("We are descending the entropy gradient")# Initialize with asymmetric distribution (away from saddle point)
theta_init = np.array([1.0, -0.5, -0.2, -0.3])
theta_init = theta_init - np.mean(theta_init) # Ensure constraint is satisfied
# Run gradient ascent
theta_history, entropy_history = gradient_ascent_four_bin(theta_init, steps=100, learning_rate=1.0)
# Create a grid for visualization
x = np.linspace(-2, 2, 100)
y = np.linspace(-2, 2, 100)
X, Y = np.meshgrid(x, y)
# Compute entropy at each grid point (with constraint on theta3 and theta4)
Z = np.zeros_like(X)
for i in range(X.shape[0]):
for j in range(X.shape[1]):
# Create full theta vector with constraint that sum is zero
theta1, theta2 = X[i,j], Y[i,j]
theta3 = -0.5 * (theta1 + theta2)
theta4 = -0.5 * (theta1 + theta2)
theta = np.array([theta1, theta2, theta3, theta4])
Z[i,j] = exponential_family_entropy(theta)
# Compute gradient field
dX = np.zeros_like(X)
dY = np.zeros_like(Y)
for i in range(X.shape[0]):
for j in range(X.shape[1]):
# Create full theta vector with constraint
theta1, theta2 = X[i,j], Y[i,j]
theta3 = -0.5 * (theta1 + theta2)
theta4 = -0.5 * (theta1 + theta2)
theta = np.array([theta1, theta2, theta3, theta4])
# Get full gradient and project
grad = entropy_gradient(theta)
proj_grad = project_gradient(theta, grad)
# Store first two components
dX[i,j] = proj_grad[0]
dY[i,j] = proj_grad[1]
# Normalize gradient vectors for better visualization
norm = np.sqrt(dX**2 + dY**2)
# Avoid division by zero
norm = np.where(norm < 1e-10, 1e-10, norm)
dX_norm = dX / norm
dY_norm = dY / norm
# A few gradient vectors for visualization
stride = 10Figure: Visualisation of a saddle point projected down to two dimensions.
Figure: Entropy evolution during gradient ascent on the four-bin system.
The animation of system evolution would show initial rapid movement along high-eigenvalue directions, progressive slowing in directions with low eigenvalues and formation of information reservoirs in the critically slowed directions. Parameter-capacity uncertainty emerges naturally at the saddle point.
Saddle Points
Saddle points represent critical transitions in the game’s evolution where the gradient \(\nabla_{\boldsymbol{\theta}}S \approx 0\) but the game is not at a maximum or minimum. At these points.
- The Fisher information matrix \(G(\boldsymbol{\theta})\) has eigenvalues with significantly different magnitudes
- Some eigenvalues approach zero, creating “critically slowed” directions in parameter space
- Other eigenvalues remain large, allowing rapid evolution in certain directions
This creates a natural separation between “memory” variables (associated with near-zero eigenvalues) and “processing” variables (associated with large eigenvalues). The game’s behavior becomes highly non-isotropic in parameter space.
At saddle points, direct gradient ascent stalls, and the game must leverage the Fourier duality between parameters and capacity variables to continue entropy production. The duality relationship \[ c(M) = \mathcal{F}[\boldsymbol{\theta}(M)] \] allows the game to progress by temporarily increasing uncertainty in capacity space, which creates gradients in previously flat directions of parameter space.
These saddle points often coincide with phase transitions between parameter-dominated and capacity-dominated regimes, where the game’s fundamental character changes in terms of information processing capabilities.
At saddle points, we see the first manifestation of the uncertainty principle that will be explored in more detail. The relationship between parameters and capacity variables becomes important as the game navigates these critical regions. The Fourier duality relationship \[ c(M) = \mathcal{F}[\boldsymbol{\theta}(M)] \] is not just a mathematical convenience but represents a constraint on information processing that parallels emerges from uncertainty principles. The duality is essential for understanding how the game maintains both precision in parameters and sufficient capacity for information storage.
The emergence of critically slowed directions at saddle points directly leads to the formation of information reservoirs that we’ll explore in depth. These reservoirs form when certain parameter combinations become effectively “frozen” due to near-zero eigenvalues in the Fisher information matrix. This natural separation of timescales creates a hierarchical memory structure that resembles biological information processing systems, where different variables operate at different temporal scales. The game’s deliberate use of steepest ascent rather than natural gradient ensures these reservoirs form organically as the system evolves.
Saddle Point Seeking Behaviour
In the game’s evolution, we follow steepest ascent in parameter space to maximize entropy. Let’s contrast with the natural gradient approach that is often used in information geometry.
The steepest ascent direction in Euclidean space is given by, \[ \Delta \boldsymbol{\theta}_{\text{steepest}} = \eta \nabla_{\boldsymbol{\theta}} S = \eta \mathbf{g} \] where \(\eta\) is a learning rate and \(\mathbf{g}\) is the entropy gradient.
In contrast, the natural gradient adjusts the update direction according to the Fisher information geometry, \[ \Delta \boldsymbol{\theta}_{\text{natural}} = \eta G(\boldsymbol{\theta})^{-1} \nabla_{\boldsymbol{\theta}} S = \eta G(\boldsymbol{\theta})^{-1} \mathbf{g} \] where \(G(\boldsymbol{\theta})\) is the Fisher information matrix. This represents a Newton step in the natural parameter space. Often the Newton step is difficult to compute, but for exponential families and their entropies the Fisher information has a form closely related to the gradients and would be easy to leverage. The game explicitly uses steepest ascent and this leads to very different behaviour, in particular near saddle points. In this regime
Steepest ascent slows dramatically in directions where the gradient is small, leading to extremely slow progress along the critically slowed modes. This actually helps the game by preserving information in these modes while allowing continued evolution in other directions.
Natural gradient would normalize the updates by the Fisher information, potentially accelerating progress in critically slowed directions. This would destroy the natural emergence of information reservoirs that we desire.
The use of steepest ascent rather than natural gradient is deliberate in our game. It allows the Fisher information matrix’s eigenvalue structure to directly influence the temporal dynamics, creating a natural separation of timescales that preserves information in critically slowed modes while allowing rapid evolution in others.
As the game approaches a saddle point
The gradient \(\nabla_{\boldsymbol{\theta}} S\) approaches zero in some directions but remains non-zero in others
The eigendecomposition of the Fisher information matrix \(G(\boldsymbol{\theta}) = V \Lambda V^T\) reveals which directions are critically slowed
Update magnitudes in different directions become proportional to their corresponding eigenvalues
This creates the hierarchical timescale separation that forms the basis of our memory structure
This behavior creates a computational architecture where different variables naturally assume different functional roles based on their update dynamics, without requiring explicit design. The information geometry of the parameter space, combined with steepest ascent dynamics, self-organizes the game into memory and processing components.
The saddle point dynamics in Jaynes’ World provide a mathematical framework for understanding how the game navigates the information landscapes. The balance between fast-evolving “processing” variables and slow-evolving “memory” variables offers insights into how complexity might emerge in environments that instantaneously maximise entropy.
Gradient Flow and Least Action Principles
The steepest ascent dynamics in our system naturally connect to least action principles in physics. We can demonstrate this connection through visualizing how our uncertainty ellipses evolve along paths of steepest entropy increase.
For our entropy game, we can define an information-theoretic action, \[ \mathcal{A}[\gamma] = \int_0^T \left(\dot{\boldsymbol{\theta}} \cdot \nabla_{\boldsymbol{\theta}} S - \frac{1}{2}\|\dot{\boldsymbol{\theta}}\|^2\right) \text{d}t \] where \(\gamma\) is a path through parameter space. The first term represents the rate of entropy production along the path (\(\frac{\text{d}S}{\text{d}\theta} \cdot \frac{\text{d}\theta}{\text{d}t}\)), while the second term constrains how quickly parameters can change. Maximizing this action leads naturally to gradient flow dynamics, where changes in parameters follow the entropy gradient: \[ \dot{\boldsymbol{\theta}} = \nabla_{\boldsymbol{\theta}} S \]
This is exactly what our steepest ascent dynamics implement: the system follows the entropy gradient, with the learning rate controlling the size of parameter updates. As the system evolves, it naturally creates information reservoirs in directions where the gradient is small but non-zero.
import numpy as np
# Initialize system with 2 position-momentum pairs
n_pairs = 2
G_init = initialize_multidimensional_state(n_pairs, squeeze_factors=[0.1, 0.2])
# Simulate path
path_history, entropy_production = simulate_action_path(G_init)Figure: Visualization of the gradient flow through parameter space.
Figure: Visualization of the corresponding evolution of uncertainty ellipses (right). The dashed lines show minimum uncertainty bounds.
The action integral governing this evolution can be written: \[ \mathcal{A}[\gamma] = \int_0^T \left(\dot{\boldsymbol{\theta}} \cdot \nabla_{\boldsymbol{\theta}} S - \frac{1}{2}\dot{\boldsymbol{\theta}}^\top G \dot{\boldsymbol{\theta}}\right) \text{d}t \] where \(G\) is the Fisher information metric. The path follows steepest entropy increase while respecting quantum uncertainty constraints, naturally transitioning from quantum-like to classical-like behavior.
Uncertainty Principle
One challenge is how to parameterise our exponential family. We’ve mentioned that the variables \(Z\) are partitioned into observable variables \(X\) and memory variables \(M\). Given the minimal entropy initial state, the obvious initial choice is that at the origin all variables, \(Z\), should be in the information reservoir, \(M\). This implies that they are well determined and present a sensible choice for the source of our parameters.
We define a mapping, \(\boldsymbol{\theta}(M)\), that maps the information resevoir to a set of values that are equivalent to the natural parameters. If the entropy of these parameters is low, and the distribution \(\rho(\boldsymbol{\theta})\) is sharply peaked then we can move from treating the memory mapping, \(\boldsymbol{\theta}(\cdot)\), as a random processe to an assumption that it is a deterministic function. We can then follow gradients with respect to these \(\boldsymbol{\theta}\) values.
This allows us to rewrite the distribution over \(Z\) in a conditional form, \[ \rho(X|M) = h(X) \exp(\boldsymbol{\theta}(M)^\top T(X) - A(\boldsymbol{\theta}(M))). \]
Unfortunately this assumption implies that \(\boldsymbol{\theta}(\cdot)\) is a delta function, and since our representation as a compact manifold (bounded below by \(0\) and above by \(N\)) it does not admit any such singularities.
Formal Derivation of the Uncertainty Principle
We can derive the uncertainty principle formally from the information-theoretic properties of the system. Consider the mutual information between parameters \(\boldsymbol{\theta}(M)\) and capacity variables \(c(M)\): \[ I(\boldsymbol{\theta}(M); c(M)) = H(\boldsymbol{\theta}(M)) + H(c(M)) - H(\boldsymbol{\theta}(M), c(M)) \] where \(H(\cdot)\) represents differential entropy.
Since the total entropy of the system is bounded by \(N\), we know that \(h(\boldsymbol{\theta}(M), c(M)) \leq N\). Additionally, for any two random variables, the mutual information satisfies \(I(\boldsymbol{\theta}(M); c(M)) \geq 0\), with equality if and only if they are independent.
For our system to function as an effective information reservoir, \(\boldsymbol{\theta}(M)\) and \(c(M)\) cannot be independent - they must share information. This gives us, \[ h(\boldsymbol{\theta}(M)) + h(c(M)) \geq h(\boldsymbol{\theta}(M), c(M)) + I_{\min} \] where \(I_{\min} > 0\) is the minimum mutual information required for the system to function.
For variables with fixed variance, differential entropy is maximized by Gaussian distributions. For a multivariate Gaussian with covariance matrix \(\Sigma\), the differential entropy is: \[ h(\mathcal{N}(0, \Sigma)) = \frac{1}{2}\ln\left((2\pi e)^d|\Sigma|\right) \] where \(d\) is the dimensionality and \(|\Sigma|\) is the determinant of the covariance matrix.
The Cramér-Rao inequality provides a lower bound on the variance of any unbiased estimator. If \(\boldsymbol{\theta}\) is a parameter vector and \(\hat{\boldsymbol{\theta}}\) is an unbiased estimator, then: \[ \text{Cov}(\hat{\boldsymbol{\theta}}) \geq G^{-1}(\boldsymbol{\theta}) \] where \(G(\boldsymbol{\theta})\) is the Fisher information matrix.
In our context, the relationship between parameters \(\boldsymbol{\theta}(M)\) and capacity variables \(c(M)\) follows a similar bound. The Fisher information matrix for exponential family distributions has a special property: it equals the covariance of the sufficient statistics, which in our case are represented by the capacity variables \(c(M)\). This gives us \[ G(\boldsymbol{\theta}(M)) = \text{Cov}(c(M)) \]
Applying the Cramér-Rao inequality we have \[ \text{Cov}(\boldsymbol{\theta}(M)) \cdot \text{Cov}(c(M)) \geq G^{-1}(\boldsymbol{\theta}(M)) \cdot G(\boldsymbol{\theta}(M)) = \mathbf{I} \] where \(\mathbf{I}\) is the identity matrix.
For one-dimensional projections, this matrix inequality implies, \[ \text{Var}(\boldsymbol{\theta}(M)) \cdot \text{Var}(c(M)) \geq 1 \] and converting to standard deviations we have \[ \Delta\boldsymbol{\theta}(M) \cdot \Delta c(M) \geq 1. \]
When we incorporate the minimum mutual information constraint \(I_{\min}\), the bound tightens. Using the relationship between differential entropy and mutual information, we can derive \[ \Delta\boldsymbol{\theta}(M) \cdot \Delta c(M) \geq k, \] where \(k = \frac{1}{2\pi e}e^{2I_{\min}}\).
This is our uncertainty principle, directly derived from information-theoretic constraints and the Cramér-Rao bound. It represents the fundamental trade-off between precision in parameter specification and capacity for information storage.
Definition of Capacity Variables
We now provide a precise definition of the capacity variables \(c(M)\). The capacity variables quantify the potential of memory variables to store information about observable variables. Mathematically, we define \(c(M)\) as, \[ c(M) = \nabla_{\boldsymbol{\theta}} A(\boldsymbol{\theta}(M)) \] where \(A(\boldsymbol{\theta})\) is the log-partition function from our exponential family distribution. This definition has a clear interpretation: \(c(M)\) represents the expected values of the sufficient statistics under the current parameter values.
This definition also naturally yields the Fourier relationship between parameters and capacity. In exponential families, the log-partition function and its derivatives form a Legendre transform pair, which is the mathematical basis for the Fourier duality we claim. Specifically, if we define the Fourier transform operator \(\mathcal{F}\) as the mapping that takes parameters to expected sufficient statistics, then: \[ c(M) = \mathcal{F}[\boldsymbol{\theta}(M)] \]
Capacity \(\leftrightarrow\) Precision Paradox
This creates an apparent paradox, at minimal entropy states, the information reservoir must simultaneously maintain precision in the parameters \(\boldsymbol{\theta}(M)\) (for accurate system representation) but it must also provide sufficient capacity \(c(M)\) (for information storage).
The trade-off can be expressed as, \[ \Delta\boldsymbol{\theta}(M) \cdot \Delta c(M) \geq k, \] where \(k\) is a constant. This relationship can be recognised as a natural uncertainty principle that underpins the behaviour of the game. This principle is a necessary consequence of information theory. It follows from the requirement for the parameter-like states, \(M\) to have both precision and high capacity (in the Shannon sense ). The uncertainty principle ensures that when parameters are sharply defined (low \(\Delta\boldsymbol{\theta}\)), the capacity variables have high uncertainty (high \(\Delta c\)), allowing information to be encoded in their relationships rather than absolute values.
This trade-off between precision and capacity directly parallels Shannon’s insights about information transmission (Shannon, 1948), where he demonstrated that increasing the precision of a signal requires increasing bandwidth or reducing noise immunity—creating an inherent trade-off in any communication system. Our formulation extends this principle to the information reservoir’s parameter space.
In practice this means that the parameters \(\boldsymbol{\theta}(M)\) and capacity variables \(c(M)\) must form a Fourier-dual pair, \[ c(M) = \mathcal{F}[\boldsymbol{\theta}(M)], \] This duality becomes important at saddle points when direct gradient ascent stalls.
The mathematical formulation of the uncertainty principle comes from Hirschman Jr (1957) and later refined by Beckner (1975) and Białynicki-Birula and Mycielski (1975). These works demonstrated that Shannon’s information-theoretic entropy provides a natural framework for expressing the uncertainty principle, establishing a direct bridge between the mathematical formalism of quantum mechanics and information theory. Our capacity-precision trade-off follows this tradition, expressing the fundamental limits of information processing in our system.
Quantum vs Classical Information Reservoirs
The uncertainty principle means that the game can exhibit quantum-like information processing regimes during evolution. This inspires an information-theoretic perspective on the quantum-classical transition.
At minimal entropy states near the origin, the information reservoir has characteristics reminiscent of quantum systems.
Wave-like information encoding: The information reservoir near the origin necessarily encodes information in distributed, interference-capable patterns due to the uncertainty principle between parameters \(\boldsymbol{\theta}(M)\) and capacity variables \(c(M)\).
Non-local correlations: Parameters are highly correlated through the Fisher information matrix, creating structures where information is stored in relationships rather than individual variables.
Uncertainty-saturated regime: The uncertainty relationship \(\Delta\boldsymbol{\theta}(M) \cdot \Delta c(M) \geq k\) is nearly saturated (approaches equality), similar to Heisenberg’s uncertainty principle in quantum systems and the entropic uncertainty relations established by Białynicki-Birula and Mycielski (1975).
As the system evolves towards higher entropy states, a transition occurs where some variables exhibit classical behavior.
From wave-like to particle-like: Variables transitioning from \(M\) to \(X\) shift from storing information in interference patterns to storing it in definite values with statistical uncertainty.
Decoherence-like process: The uncertainty product \(\Delta\boldsymbol{\theta}(M) \cdot \Delta c(M)\) for these variables grows significantly larger than the minimum value \(k\), indicating a departure from quantum-like behavior.
Local information encoding: Information becomes increasingly encoded in local variables rather than distributed correlations.
The saddle points in our entropy landscape mark critical transitions between quantum-like and classical information processing regimes. Near these points
The critically slowed modes maintain quantum-like characteristics, functioning as coherent memory that preserves information through interference patterns.
The rapidly evolving modes exhibit classical characteristics, functioning as incoherent processors that manipulate information through statistical operations.
This natural separation creates a hybrid computational architecture where quantum-like memory interfaces with classical-like processing.
The quantum-classical transition can be quantified using the moment generating function \(M_Z(t)\). In quantum-like regimes, the MGF exhibits oscillatory behavior with complex analytic structure, whereas in classical regimes, it grows monotonically with simple analytic structure. The transition between these behaviors identifies variables moving between quantum-like and classical information processing modes.
This perspective suggests that what we recognize as “quantum” versus “classical” behavior may fundamentally reflect different regimes of information processing - one optimized for coherent information storage (quantum-like) and the other for flexible information manipulation (classical-like). The emergence of both regimes from our entropy-maximizing model indicates that nature may exploit this computational architecture to optimize information processing across multiple scales.
This formulation of the uncertainty principle in terms of information capacity and parameter precision follows the tradition established by Shannon (1948) and expanded upon by Hirschman Jr (1957) and others who connected information entropy uncertainty to Heisenberg’s uncertainty.
Quantitative Demonstration
We can demonstrate this principle quantitatively through a simple model. Consider a two-dimensional system with memory variables \(M = (m_1, m_2)\) that map to parameters \(\boldsymbol{\theta}(M) = (\theta_1(m_1), \theta_2(m_2))\). The capacity variables are \(c(M) = (c_1(m_1), c_2(m_2))\).
At minimal entropy, when the system is near the origin, the uncertainty product is exactly: \[ \Delta\theta_i(m_i) \cdot \Delta c_i(m_i) = k \] for each dimension \(i\).
As the system evolves and entropy increases, some variables transition to classical behavior with: \[ \Delta\theta_i(m_i) \cdot \Delta c_i(m_i) \gg k \]
This increased product reflects the transition from quantum-like to classical information processing. The variables that maintain the minimal uncertainty product \(k\) continue to function as coherent information reservoirs, while those with larger uncertainty products function as classical processors.
This principle provides testable predictions for any system modeled as an information reservoir. Specifically, we predict that variables functioning as effective memory must demonstrate precision-capacity trade-offs near the theoretical minimum \(k\), while processing variables will show excess uncertainty above this minimum.
Visualising the Parameter-Capacity Uncertainty Principle
The uncertainty principle between parameters \(\theta\) and capacity variables \(c\) is a fundamental feature of information reservoirs. We can visualize this uncertainty relation using phase space plots.
We can demonstrate how the uncertainty principle manifests in different regimes:
Quantum-like regime: Near minimal entropy, the uncertainty product \(\Delta\theta \cdot \Delta c\) approaches the lower bound \(k\), creating wave-like interference patterns in probability space.
Transitional regime: As entropy increases, uncertainty relations begin to decouple, with \(\Delta\theta \cdot \Delta c > k\).
Classical regime: At high entropy, parameter uncertainty dominates, creating diffusion-like dynamics with minimal influence from uncertainty relations.
The visualization shows probability distributions for these three regimes in both parameter space and capacity space.
import numpy as npFigure: Visualisaiton of the uncertainty trade-off between parameter precision and capacity.
This visualization helps explain why information reservoirs with quantum-like properties naturally emerge at minimal entropy. The uncertainty principle is not imposed but arises naturally from the constraints of Shannon information theory applied to physical systems operating at minimal entropy.
Conceptual Framework
The Jaynes’ world game illustrates fundamental principles of information dynamics.
Information Conservation: Total information remains constant but redistributes between structure and randomness. This follows from the fundamental uncertainty principle between parameters and capacity. As parameters become less precisely specified, capacity increases.
Uncertainty Principle: Precision in parameters trades off with entropy capacity. This is not merely a mathematical constraint but a necessary feature of any physical information reservoir that must maintain both stability and sufficient capacity.
Self-Organization: The system autonomously navigates toward maximum entropy while maintaining necessary structure through critically slowed modes. These modes function as information reservoirs that preserve essential constraints while allowing maximum entropy production elsewhere.
Information-Energy Duality: The framework connects to thermodynamic concepts through the relationship between entropy production and available work. As shown by Sagawa and Ueda, information gain can be translated into extractable work, suggesting that our entropy game has a direct thermodynamic interpretation.
The information-modified second law indicates that the maximum extractable work is increased by \(k_BT\cdot I(X;M)\), where \(I(X;M)\) is the mutual information between observable variables and memory. This creates a direct connection between our information reservoir model and physical thermodynamic systems.
The zero-player game provides a mathematical model for studying how complex systems evolve when they instantaneously maximize entropy production.
Conclusion
The zero-player game Jaynes’ world provides a mathematical model for studying how complex systems evolve when they instantaneously maximize entropy production.
Our analysis suggests the game could illustrate the fundamental principles of information dynamics, including information conservation, an uncertainty principle, self-organization, and information-energy duality.
The game’s architecture should naturally organize into memory and processing components, without requiring explicit design.
The game’s temporal dynamics are based on steepest ascent in parameter space, this allows for analysis through the Fisher information matrix’s eigenvalue structure to create a natural separation of timescales and the natural emergence of information reservoirs.
Unifying Perspectives on Intelligence
There are multiple perspectives we can take to understanding optimal decision making: entropy games, thermodynamic information engines, least action principles (and optimal control), and Schrödinger’s bridge - provide different views. Through introducing Jaynes’ world we look to explore the relationship between these different views of decision making to provide a more complete perspective of the limitations and possibilities for making optimal decisions.
A Unified View of Intelligence Through Information
The multiple perspectives we’ve explored - entropy games, information engines, least action principles, and Schrödinger’s bridge - provide complementary views of intelligence as optimal information processing. Each framework highlights different aspects of this fundamental process:
The Entropy Game shows us that intelligence can be measured by how efficiently a system reduces uncertainty through strategic questioning or observation.
Information Engines reveal how intelligence converts information into useful work, subject to thermodynamic constraints.
Least Action Principles demonstrate that intelligence follows optimal paths through information space, minimizing cumulative uncertainty.
Schrödinger’s Bridge illuminates how intelligence can be viewed as optimal transport of probability distributions, finding the most likely paths between states of knowledge.
These perspectives converge on a unified view: intelligence is fundamentally about optimal information processing. Whether we’re discussing human cognition, artificial intelligence, or biological systems, the capacity to efficiently acquire, process, and utilize information lies at the core of intelligent behavior.
This unified perspective offers promising directions for both theoretical research and practical applications. By understanding intelligence through the lens of information theory and thermodynamics, we may develop more principled approaches to artificial intelligence, gain deeper insights into cognitive processes, and discover fundamental limits on what intelligence can achieve.
Thanks!
For more information on these subjects and more you might want to check the following resources.
- company: Trent AI
- book: The Atomic Human
- twitter: @lawrennd
- podcast: The Talking Machines
- newspaper: Guardian Profile Page
- blog: http://inverseprobability.com